NVIDIA’s Physical AI Skills Turn Robotics Workflows Into Agent-Callable Build Steps

NVIDIA’s physical AI skills announcement is not really about robots suddenly getting smarter. It is about the less glamorous work required before robots, factory systems, autonomous vehicles, and vision models become useful: generating data, building simulations, validating outputs, tuning deployment targets, and repeating the loop without turning every team into a glue-code maintenance shop.
At GTC Taipei, NVIDIA released an open-source collection of physical AI agent skills and tools spanning Omniverse, Cosmos, Isaac, Metropolis, Alpamayo, Jetson, and industrial digital-twin workflows. The company’s framing is that agents can now use NVIDIA libraries, models, and frameworks directly to accelerate data generation, simulation, training, evaluation, and deployment. The sharper read: NVIDIA is trying to make physical AI workflows executable by coding agents without pretending the agents are the robot brain.
That distinction matters. A chat agent producing a mediocre pull request is annoying. A physical AI pipeline producing bad synthetic data, misleading simulations, or overconfident perception metrics can create real operational risk. If agents are going to touch robotics and industrial systems, they need narrower roles, stronger validation, and better provenance than the average demo suggests. NVIDIA’s skills approach is promising because it moves in that direction: define which tools to call, what outputs to produce, and how developers should validate the result.
Physical AI needs build systems, not vibes
The new skills are available through GitHub and skills.sh, with synthetic-data examples including Neural Reconstruction, Video Augmentation, and Defect Image Generation. NVIDIA is also offering these as Physical AI Launchables on Brev, which means preconfigured environments for teams that want to try workflows without assembling the stack by hand.
The stack coverage is broad. Cosmos world foundation models support physical-world reasoning and generation. Omniverse handles simulation and digital twins. Isaac covers robotics simulation and robot learning. Metropolis handles vision AI. Alpamayo targets autonomous driving. Jetson is the edge deployment path. In isolation, each is a product family. As agent-callable skills, they become build steps in a larger physical AI pipeline.
That is the useful abstraction. Physical AI teams do not need an agent that can eloquently explain sim-to-real transfer. They need something that can reconstruct a scene, generate variants, produce labeled data, run evaluation, report quality metrics, update a configuration, and stop when validation fails. The agent should be an operator of the pipeline, not a source of unchecked truth.
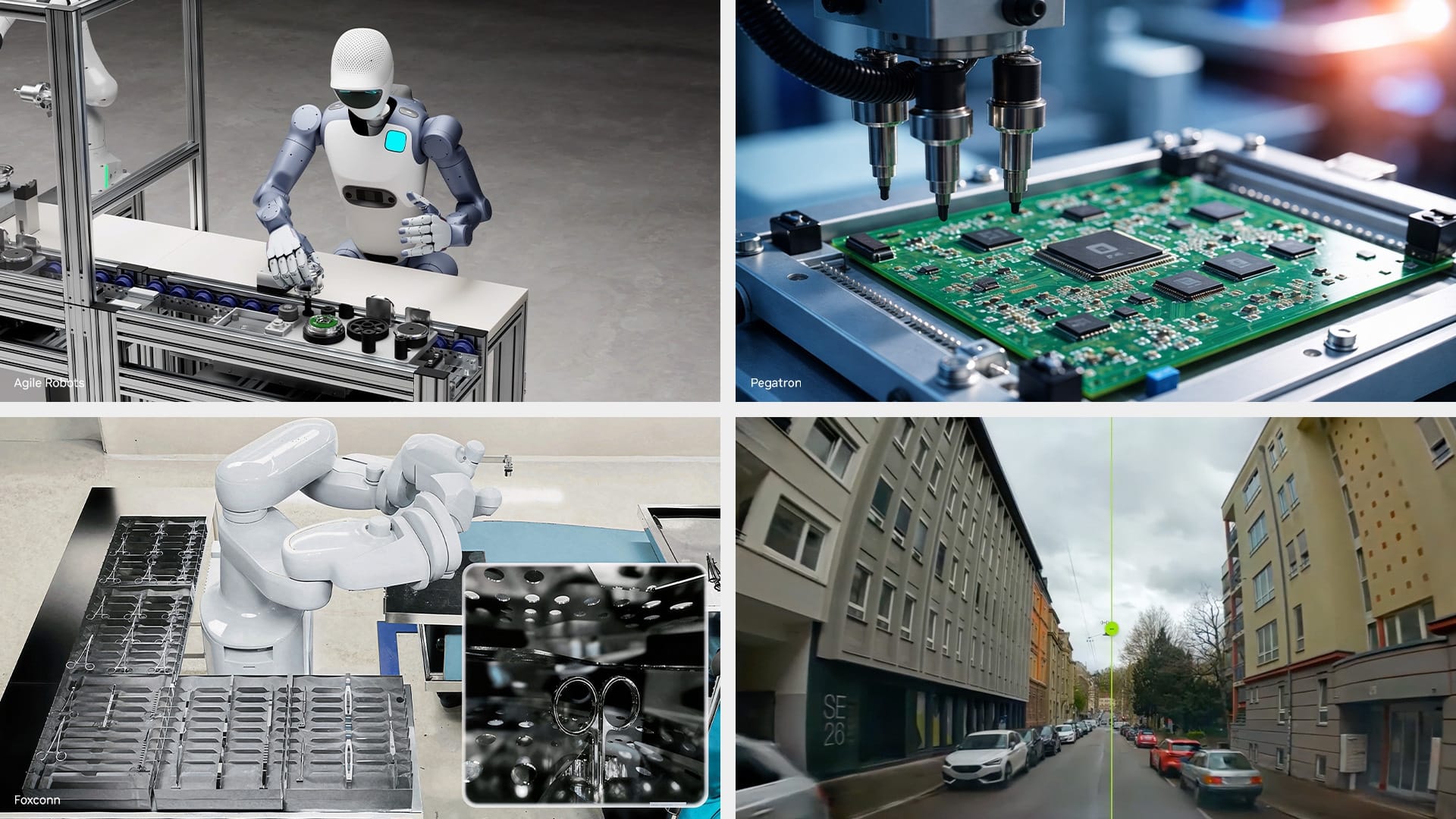
The manufacturing examples are the most concrete. Pegatron reportedly reduced model training and deployment time by 67% using synthetic data from the Defect Image Generation skill. Delta Electronics generated synthetic defect data to catch excess soldering on metal busbars and improved detection rate by 17%. Inventec reduced defect-data collection effort for laptop chassis manufacturing by 30%. Foxconn and DeepHow improved first-pass yield by about 3% by catching manufacturing errors earlier.
Those are the right metrics. “Agentic” is not a KPI. Reduced collection effort, faster deployment, better detection rate, improved yield, fewer manual labeling hours, and safer evaluation coverage are KPIs. If a physical AI skill cannot move those numbers, it is not infrastructure; it is choreography.
The data engine is becoming the robotics product
For autonomous vehicles, NVIDIA says Li Auto, Afari, and DeepRoute.ai are using Omniverse NuRec models for neural scene reconstruction and rendering, generating more than 1,000 reconstructions and over 300,000 renders and simulations per day. That scale points to the larger trend: the data engine is becoming the core asset. Robots and AV systems need data from their own point of view, with rare events, edge cases, sensor geometry, and environmental variation that internet-scale text never had to care about.
Cosmos and Omniverse are NVIDIA’s answer to that data-engine problem. The agent skills layer is a way to make the machinery programmable by higher-level systems. Instead of every team writing bespoke scripts to convert fleet captures into simulation assets, augment videos, generate synthetic defects, validate datasets, and hand results to training jobs, NVIDIA wants those steps represented as reusable skills with known inputs, outputs, and validation expectations.
That is a very CUDA-shaped move. Do not merely sell the accelerator. Standardize the way developers express the work that runs around it. For physical AI, that means the build system spans CAD conversion, OpenUSD scenes, simulation, synthetic data, training, edge deployment, and continuous evaluation. If NVIDIA can make that loop shorter and more repeatable, it increases demand for the whole platform, not just one model.
The healthcare and robotics examples show the same pattern. Foxconn and Compal are using Isaac for Healthcare for hospital robotics, including Nurabot and Compal PolyMedX. Robotics companies including 1X, Agile Robots, Agility, FieldAI, Hexagon Robotics, NEURA Robotics, Skild AI, and Universal Robots are named as users of NVIDIA’s agent-ready physical AI stack. In clinical and robotics contexts, the bar for validation is higher, which is exactly why agent skills need to be treated as controlled workflow components rather than clever prompts.
Skills are a supply chain
The risk is that “skill” sounds harmless. It is not. A skill is procedural authority handed to an autonomous system. It can encode which tools to run, what files to read, what environments to launch, what artifacts to trust, and what “done” looks like. That makes skills part documentation, part dependency, part deployment script, and part policy surface.
Teams adopting physical AI skills should treat them accordingly. Pin versions. Review source repositories. Run skills in sandboxes. Log every tool call. Require human approval before generated datasets become production training inputs. Keep synthetic data labeled as synthetic through the pipeline. Track drift between simulated performance and real-world performance. Define validation thresholds before the agent starts optimizing toward whatever metric is easiest to satisfy.
This is especially important for synthetic inspection data. Rare manufacturing defects are hard to collect, which is why synthetic generation is attractive. But synthetic data can also teach models the wrong priors if the generator fails to represent the messy distribution of real defects, lighting, surfaces, cameras, and operator variance. The right workflow is not “generate lots of images and celebrate.” It is generate, validate against real samples, test on held-out production data, monitor in deployment, and feed failures back into the loop.
Community reaction was still thin during the research window, with no meaningful Hacker News thread for NVIDIA physical AI skills. That is not necessarily a negative signal. Robotics, AV, and manufacturing teams validate through pipelines and internal metrics, not launch-day comment threads. The proof will be whether the skills reduce the time from new problem to validated dataset, validated simulation, or deployable edge model.
The LGTM take: this is the right kind of agent infrastructure for physical AI because it is specific, tool-bound, and validation-aware. NVIDIA is not just selling robot foundation models; it is trying to standardize the build steps around robots, factories, AVs, and digital twins. That is less cinematic than a humanoid demo, but it is where useful systems actually get built.
Sources: NVIDIA Newsroom, NVIDIA skills GitHub, NVIDIA Cosmos 3 technical report, NVIDIA GTC Taipei live blog, NVIDIA Cosmos